Oh well, this is going to be long and boring; please bear with me... I have warned you  If nothing else, if you care, please read at least the final comments. Thanks!
If nothing else, if you care, please read at least the final comments. Thanks!
Thanks to @Deirdre for the steps she provided. I had a look at them, re-played them locally and I learned a few interesting things.
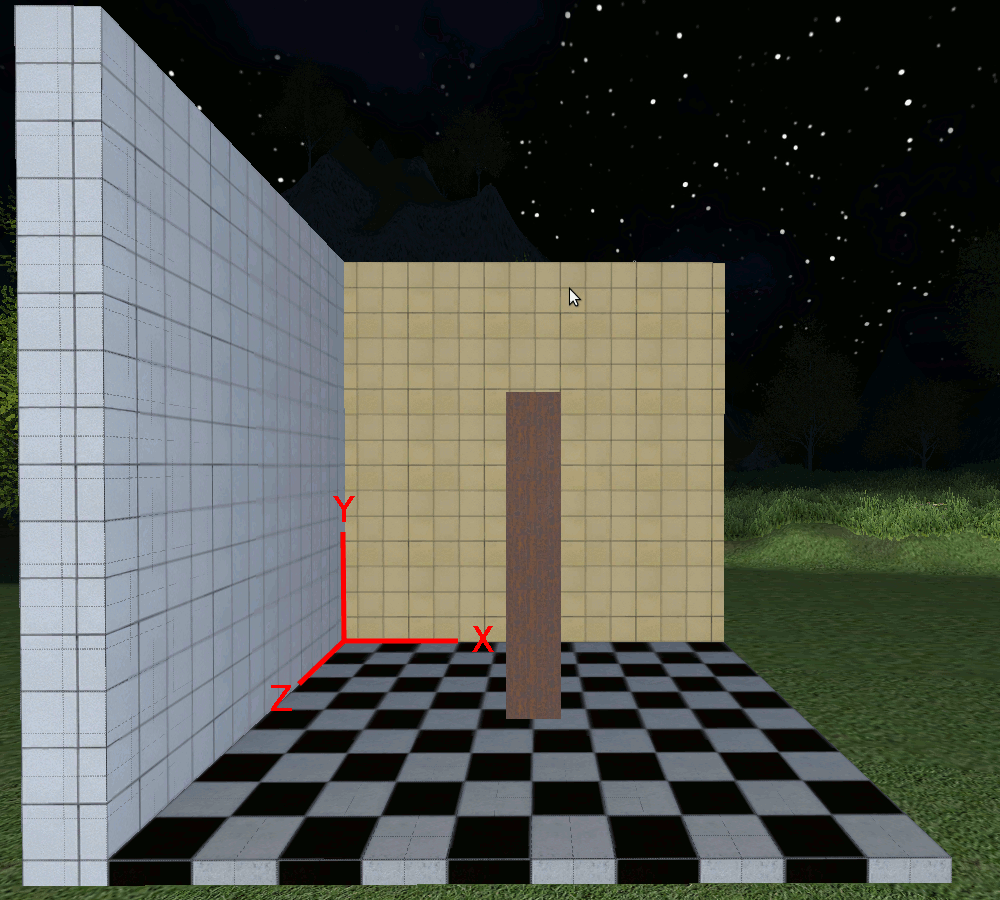
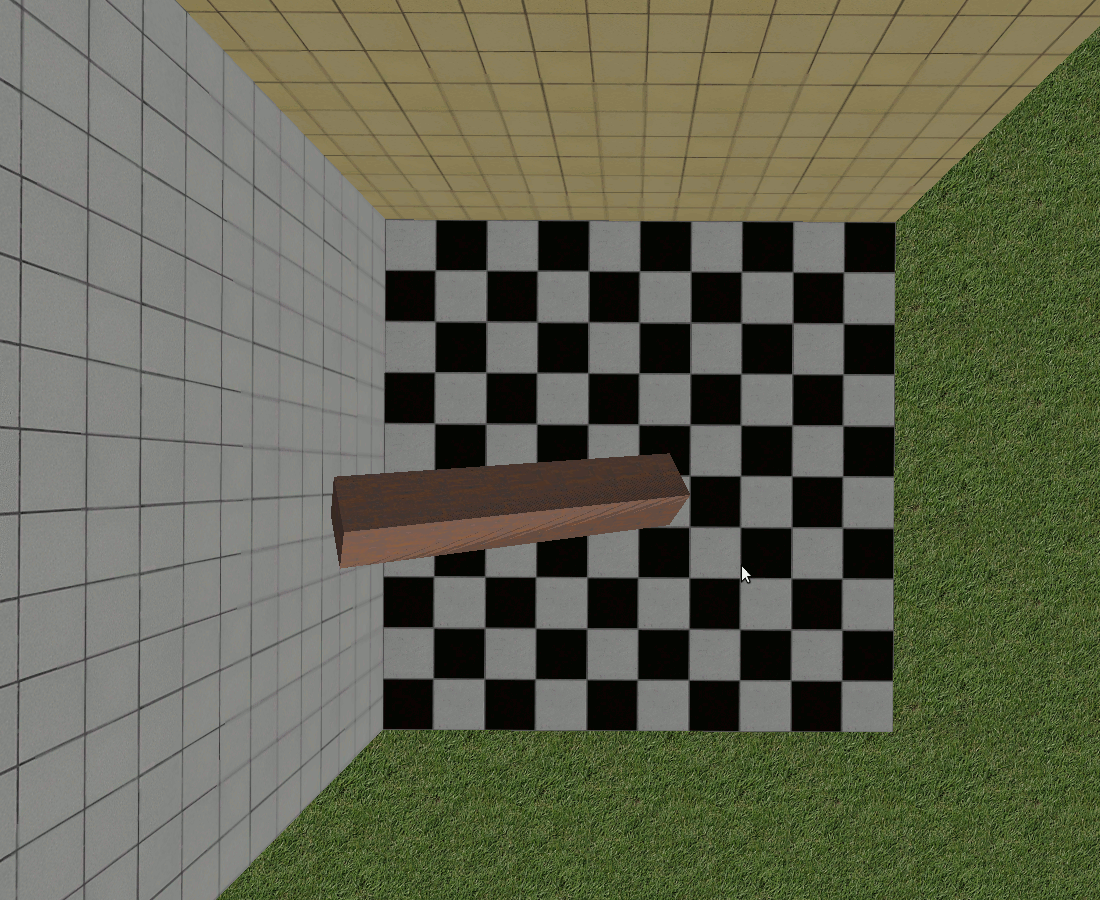
Step 0: a beam (0.5m wide, 3 m long, if you care) at default, un-rotated orientation. This is how it looks along the Z axis (I tried to take the screen shot as orthogonally as I could and I overlaid the axis names for added clarity):
and along the X axis:
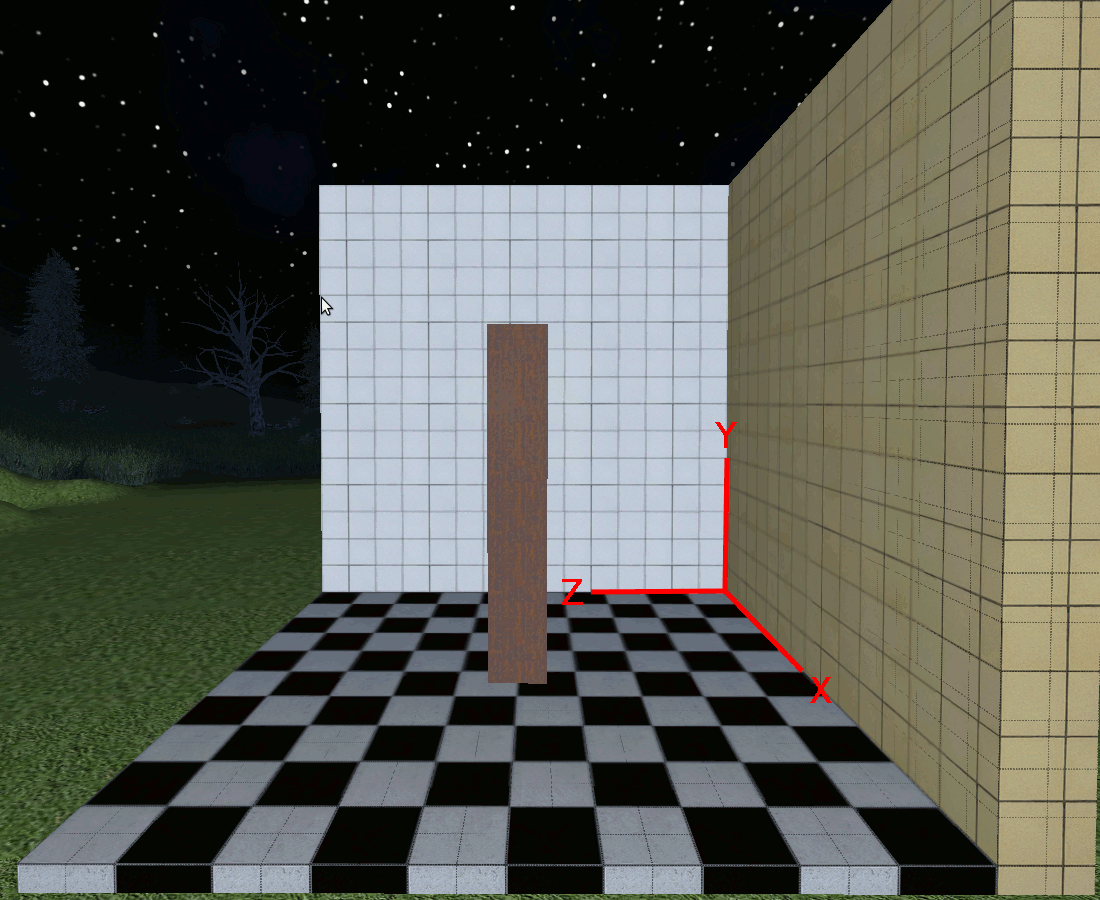
So far nothing strange.
________________________________________________________________
Step 1: 3 x UP arrow (according to Deirdre list). This should mean +45° around the X axis (currently, as the beam is not rotated, the axes of the object and of the world coincide). View along the Z axis:
and along the X axis:
Everything as expected!
______________________________________________
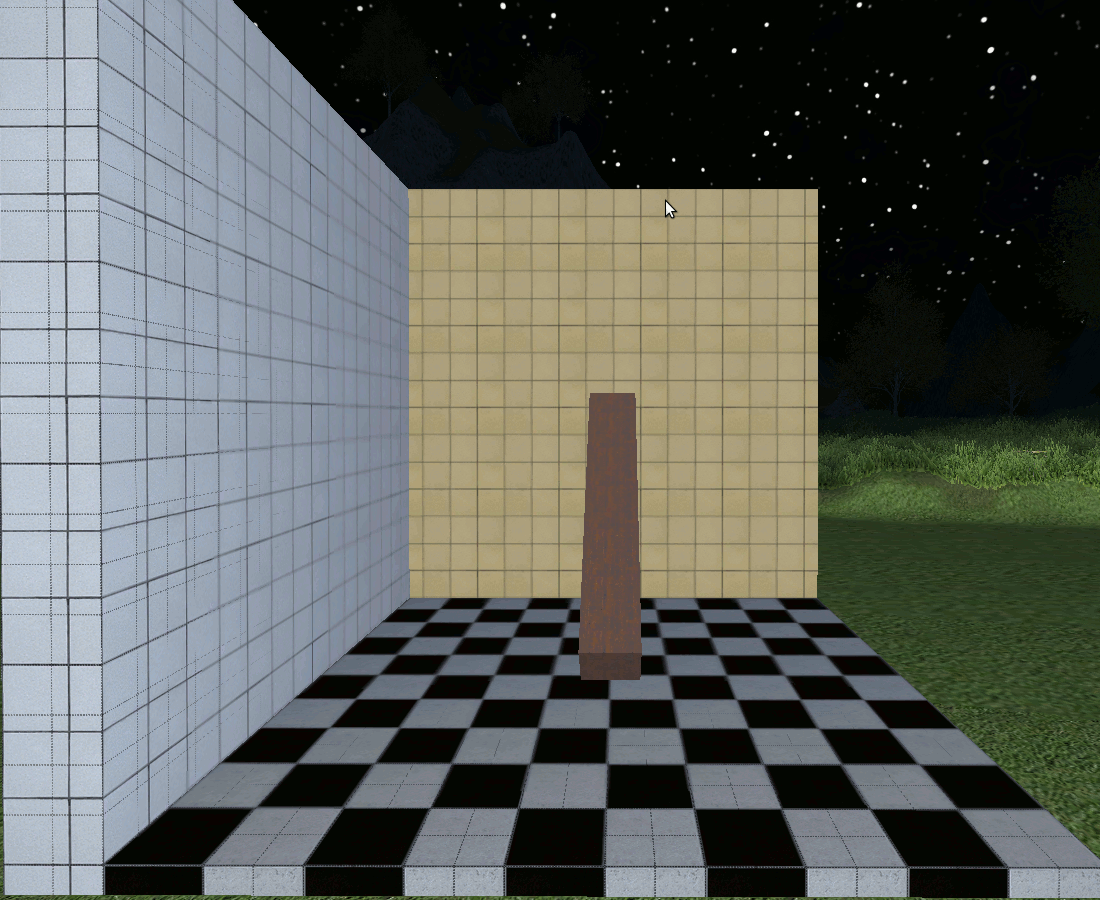
Step 2: 3 x PgDn arrow: this should mean -45° around the Z axis. View along the Z axis:
And along the X axis:
and also along the Y axis (looking down):
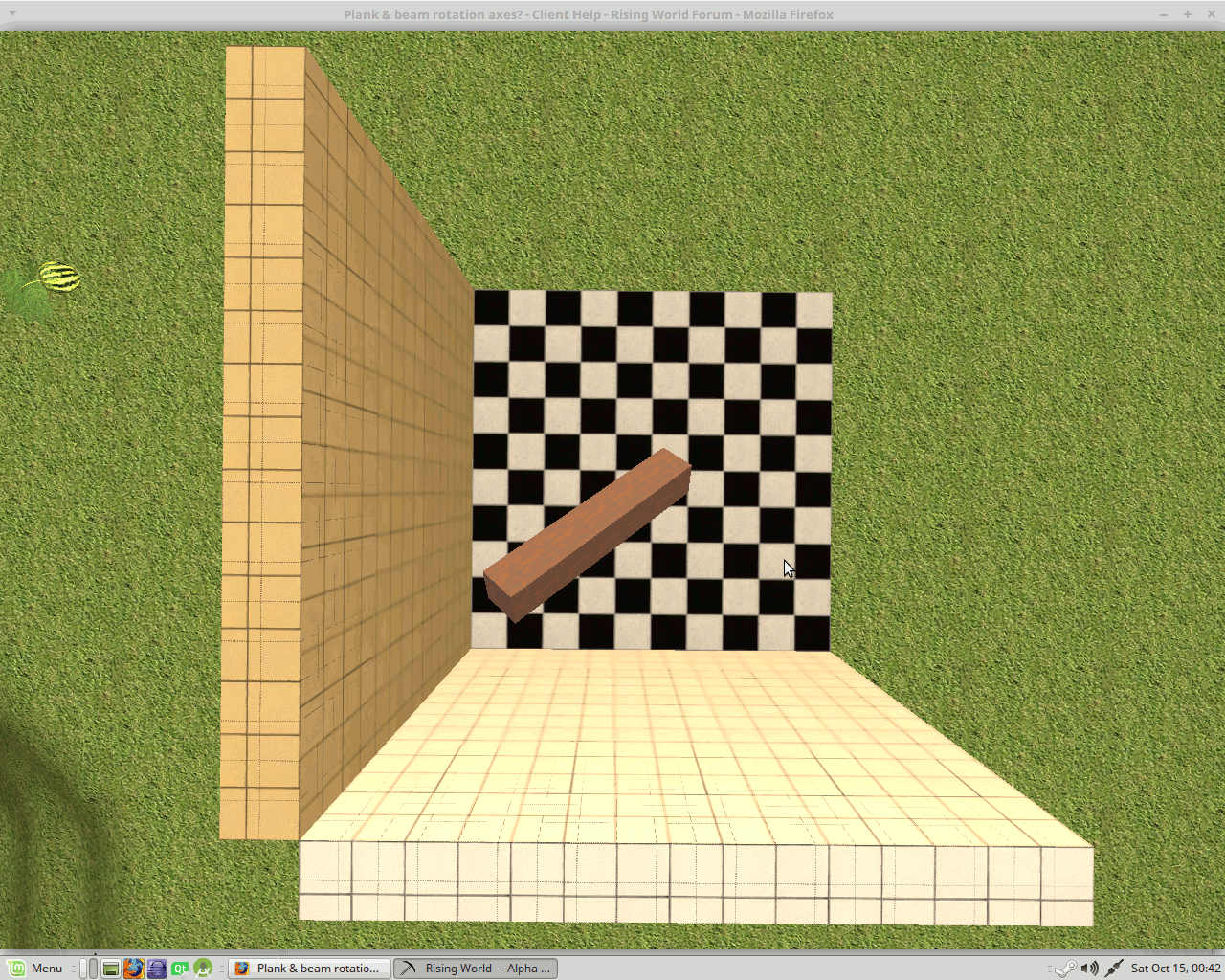
Now things start to look strange. From the screen shots a sharp eye may be needed, but while viewing the rotation on the screen, it is rather clear that this rotation is neither around the object Z axis or the world Z axis; it looks like around some undefined axis which presumably depends on the previous rotations.
__________________________________________________
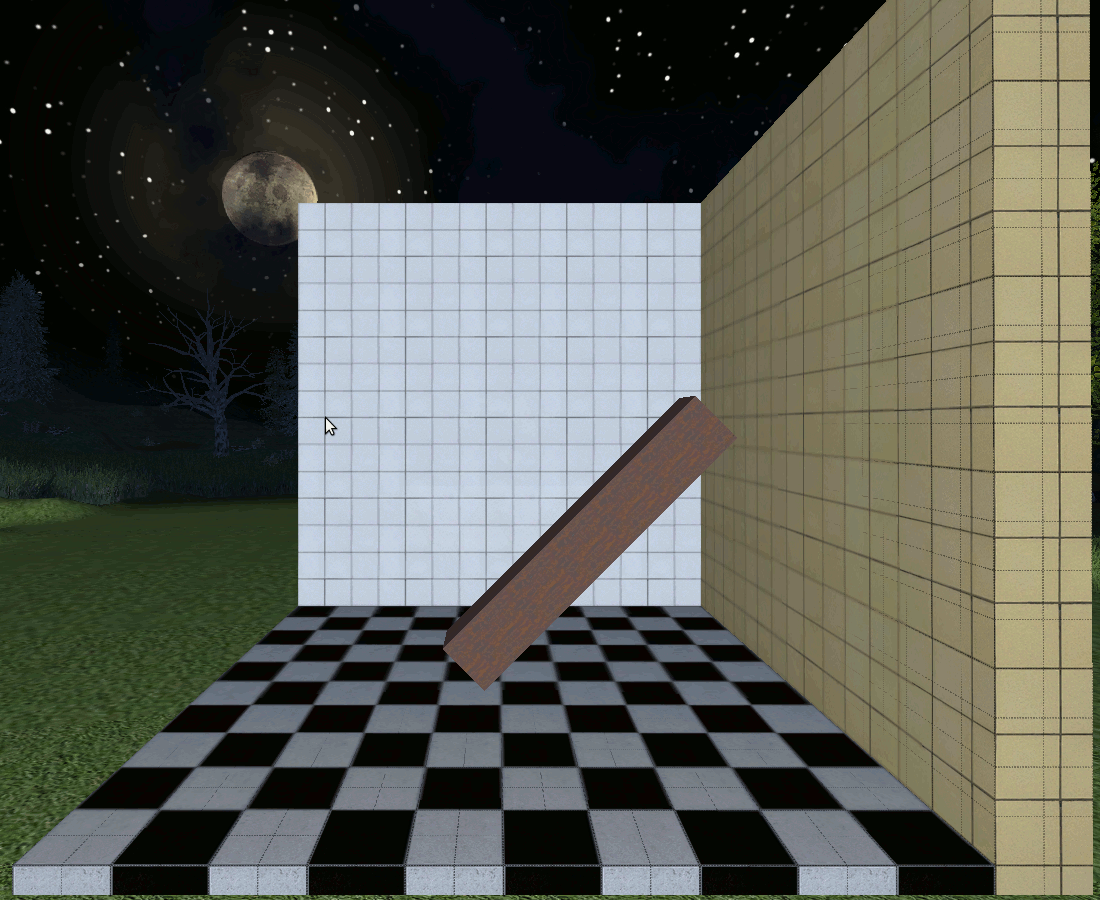
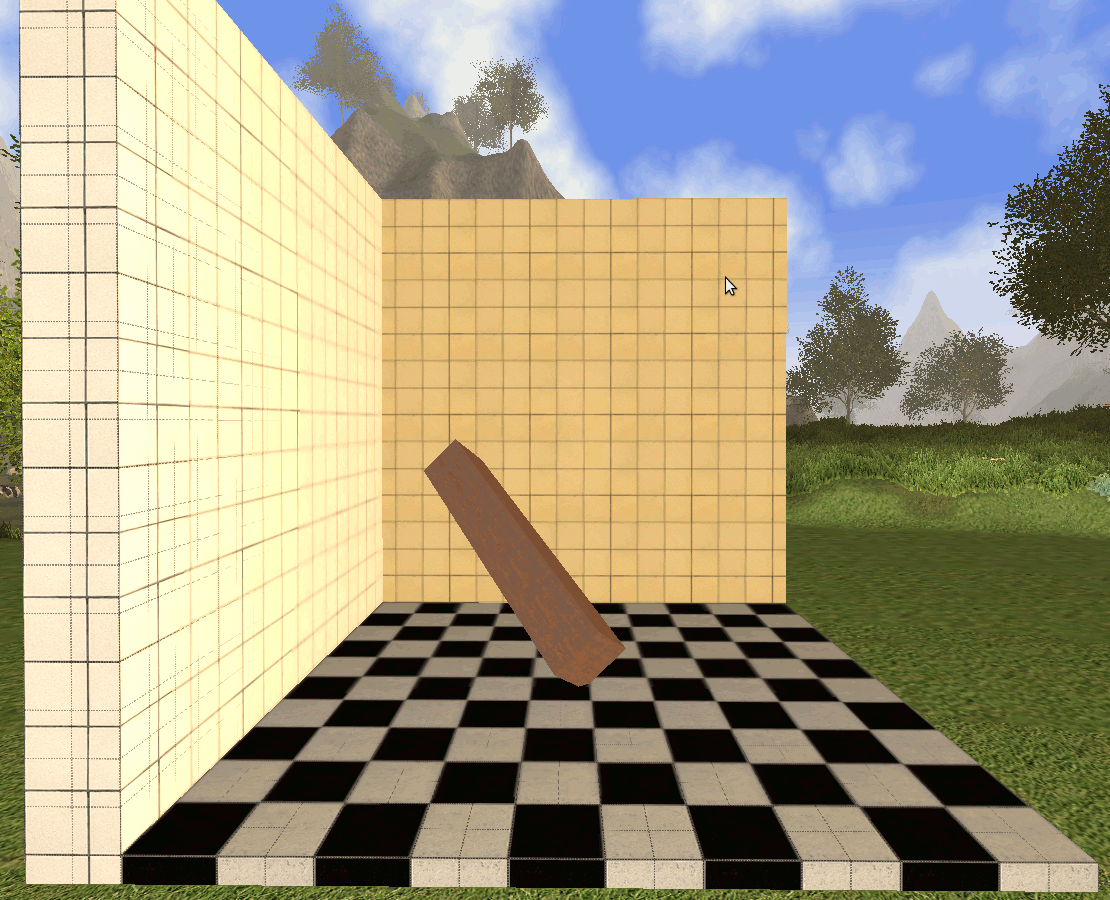
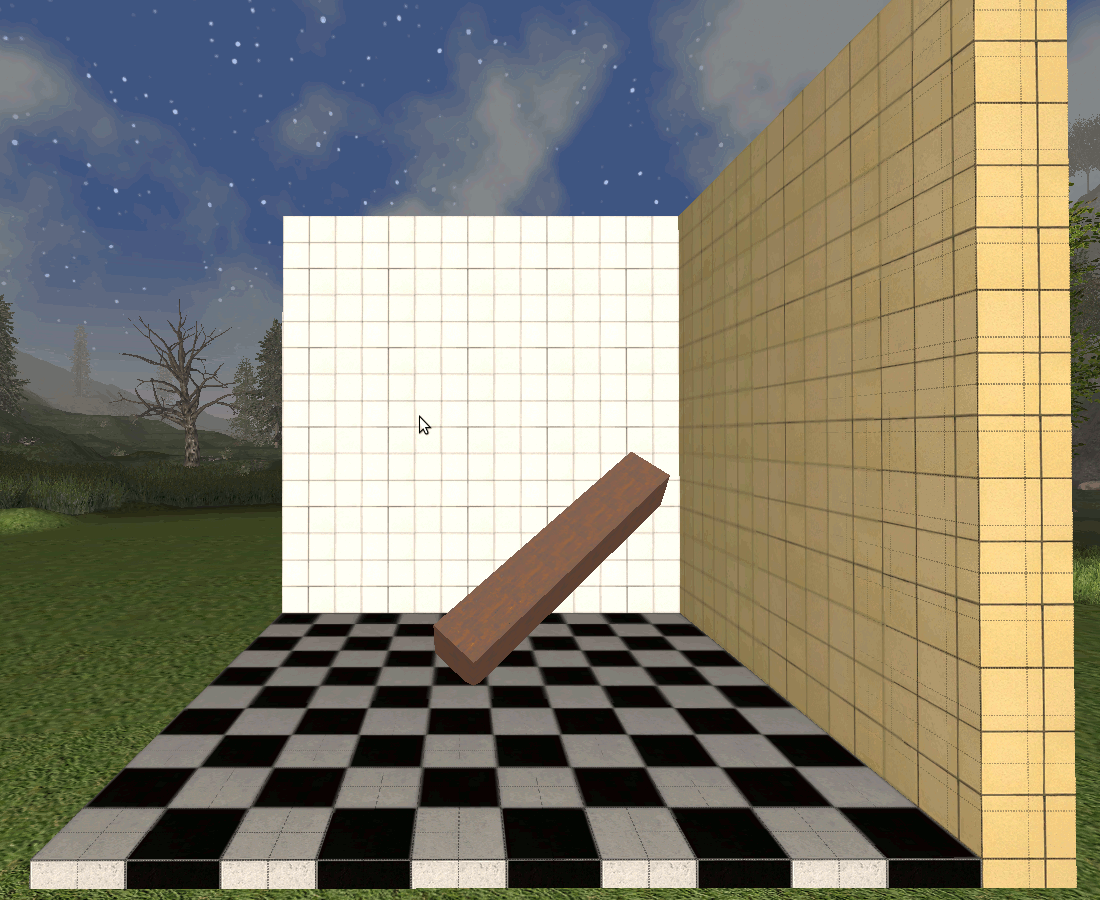
Step 3: 4 x Left arrow: which should be -60° along the Y axis. This is rather clearly the world Y axis, not the object axis (or any variable axis resulting from 'obscure' calculations). View along the Z axis:
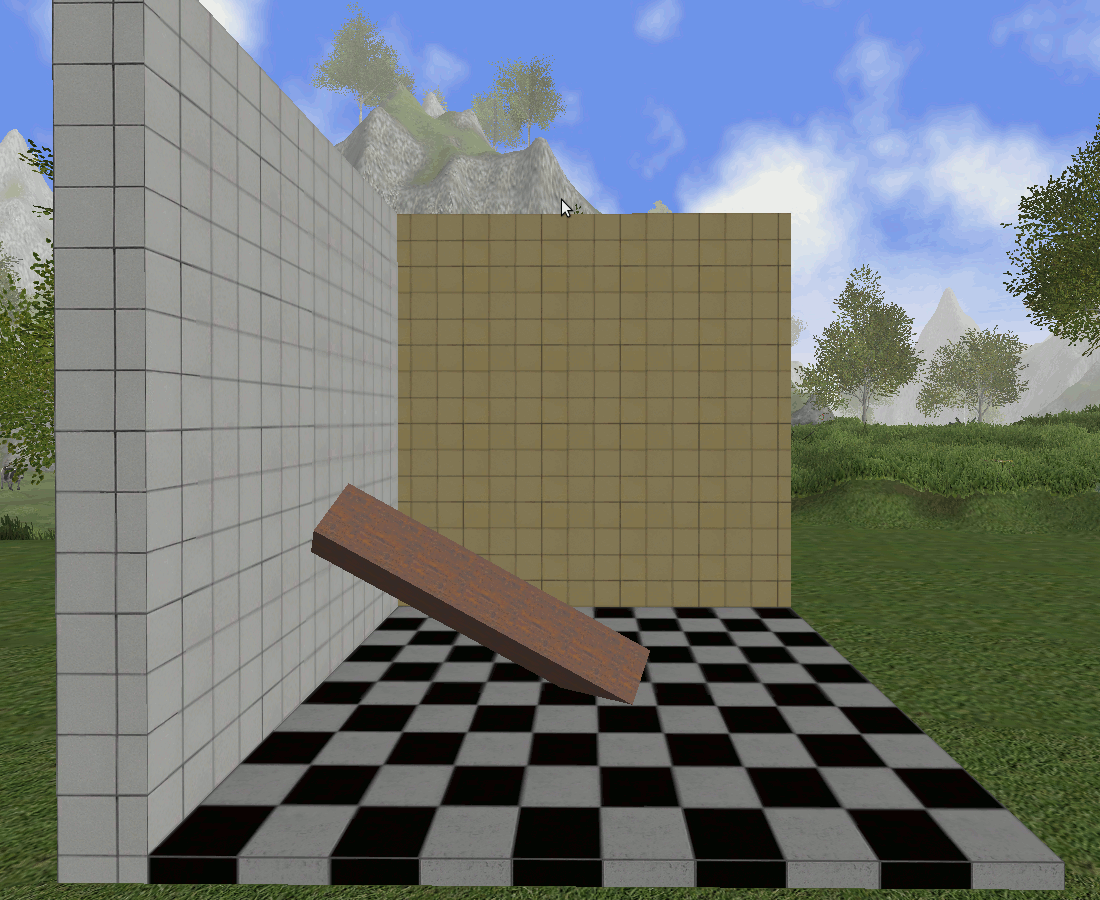
View along the X axis:
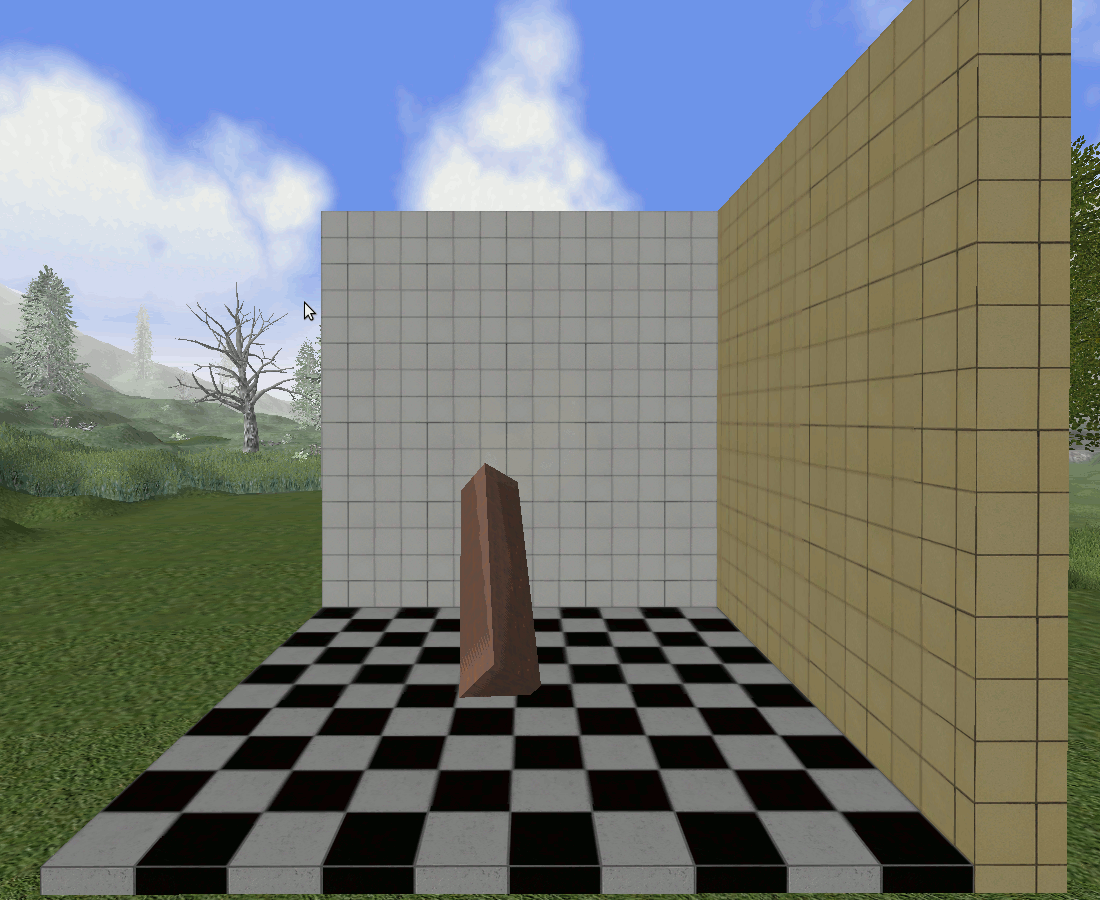
And view along the Y axis, showing that the object is not actually parallel to the XY plane::
Finally, a detail showing that the 'tilting' of the beam around ITS OWN Y axis is far from being 45°:
_________________________________________
Comments:
1) The implementation, instead of the X, Y, Z axes (as described in the F1 help screen), rotates the object around axes largely counter-intuitive and very hard to visualize; they are surely the result of internal calculations, but from the user perspective look arbitrary.
For what is worth (and from some @red51 comments above), I suspect that the implementation simply alters the X, Y or Z value of an internal representation in Euler angles, rather that implementing rotations consistently intrinsic or extrinsic. A hint might be the suspect of gimbal lock shown in OP [II], as an Euler angle representation may suffer from it.
2) By small (non-intuitive) corrections, the intended orientation might perhaps be obtained (still not sure, though). Each correction will however affect the orientation of the object around all the 3 axes and will require further corrections. It is not a matter of having half degrees available, it is a potentially never ending chase of corrections after corrections.
3) JME directly supports consistent intrinsic rotations and one could wonder which reason is strong enough to ignore this easy support. If Euler angles are preferred to persistently store the rotation data of an object, as they are the most compact representation (sparing one floating-point value over quaternions and 6 f.-p. values over matrices), the conversion could happen when writing the data to a file.
4) I am still not sure that implementation is logically complete (the suspect of gimbal lock is a strong hint that some orientation cannot be reached); right now, it definitely looks operatively incomplete, as a simple case like the one I pursued in this thread is proving very hard to reach, possibly impossible to reach with the needed precision.
5) I am glad that all of this seems not to affect many users (those looking for 'balls', as @yahgiggle says  ); still the eventual lack of precision does affect architectural realisations.
); still the eventual lack of precision does affect architectural realisations.
6) I am aware that angles, quaternions, Euler angles and so on are not glamour nor make for a popular update; still, the building capabilities of RW will remain as one of its strong points and I feel that this matter should be raised a bit in priority.